Point Data Sources and Formats / LIDAR
- As of 2010, 3D point data from laser scanning (point clouds) are becoming
increasingly common.
- There are three common cases:
- The terrestrial data is far more dense, and much more likely to be
vertically stacked (not a heightfield)
Aerial LIDAR
- LIDAR collects massive
amounts of 3D point data,
i.e. "point clouds".
- Sometimes, there is also an attribute (e.g. 0 default 1 ground 2
buildings 3 vegetation)
- There is also the intensity of the laser reflection, and the potential
of multiple "returns" from a single beam.
- The LAS binary format is a fairly standard way to encode these points.
LAStools is a
collection of utilities to read/write/convert/view LAS files, with source
code. There is also the free library
libLAS which was based on LAStools.
- There are also various proprietary formats, e.g. TerraSolid .BIN format.
- Aerial LIDAR is inherently expensive and uncommon, because of the unavoidable
cost of flying an aircraft and doing all the tracking and registration to
produce useful result.
- Usually LiDAR is a much, much better source of
elevation heightfields than
traditional DEMs (from photogrammetry contours converted to raster grids),
although there is the danger of picking up too much data,
so sophisticated methods are used to filter out "clutter" like trees and
buildings, to produce a "bare earth" DEM.
- On the flip side, unfiltered LIDAR can be the source for automatic recognition of
those buildings (and to a lesser degree, vegetation and other other
features)
- There are products like
Titan TLiD which do exactly that:
- As of 2011 there is nothing open-source or free, yet, for extracting
features from LIDAR.
Terrestrial LIDAR
- Can be extremely dense (more than 1 point per centimeter!)
- With the right equipment and care, can be very accurate: global error on
the order of a few cm from a precisely tracked moving platform, or
"survey-grade" (mm accuracy) from a total station.
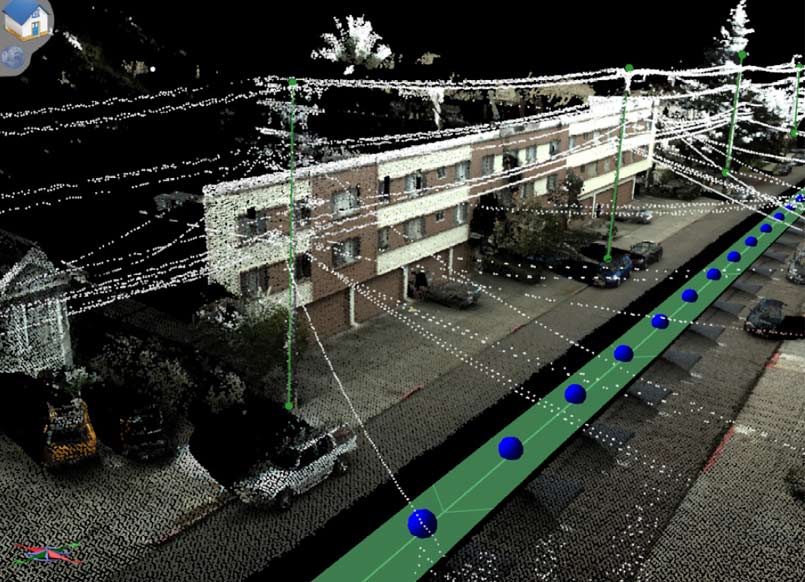
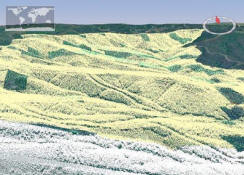
- The following snapshots (from Topcon) shows how density decreases with
distance from the sensor, and how point clouds can be colorized by
correlating an image captured at the same time as the laser:

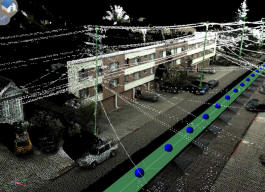
- Although this data is just points - not solid objects or higher-level
entities - it can provide a detailed source for either automatic or semi-automatic
construction of a real 3D scene.
- There are no public terrestrial LIDAR datasets, except for some at the
Robotic 3D Scan
Repository which do not appear to be georeferenced.
Open Software Support
-
 glob3 is a
very ambitious open-source project to create a "3D GIS multiplatform
framework", in Java, possibly built on top of WorldWind, which will support
both aerial and terrestrial point clouds.
glob3 is a
very ambitious open-source project to create a "3D GIS multiplatform
framework", in Java, possibly built on top of WorldWind, which will support
both aerial and terrestrial point clouds.
- It is run by Spanish company Igo Software. There is a
paper (Feb. 2011) outlining their plans.
- There are good ideas in their approach, like using a
kdTree that divides along the largest dimension.
- They are working on a server that specifically serves point cloud
data.
GIS Software Support
- The paper
Storage, manipulation, and visualization of LiDAR data explains that (as
of 2009) traditional database and GIS software's support for point clouds
was very weak, with only Oracle 11g having some ability to directly store
point clouds, with minimal indexing, and even that was very slow and
inefficient.
- That has made an opening for point-cloud-specific proprietary software
like Pointools,
Terrasolid and
Quick Terrain Modeler, which
can handle the clouds that traditional software (like ESRI) do not.